1
Data loading
The dataset: industrial bearing sensor signals
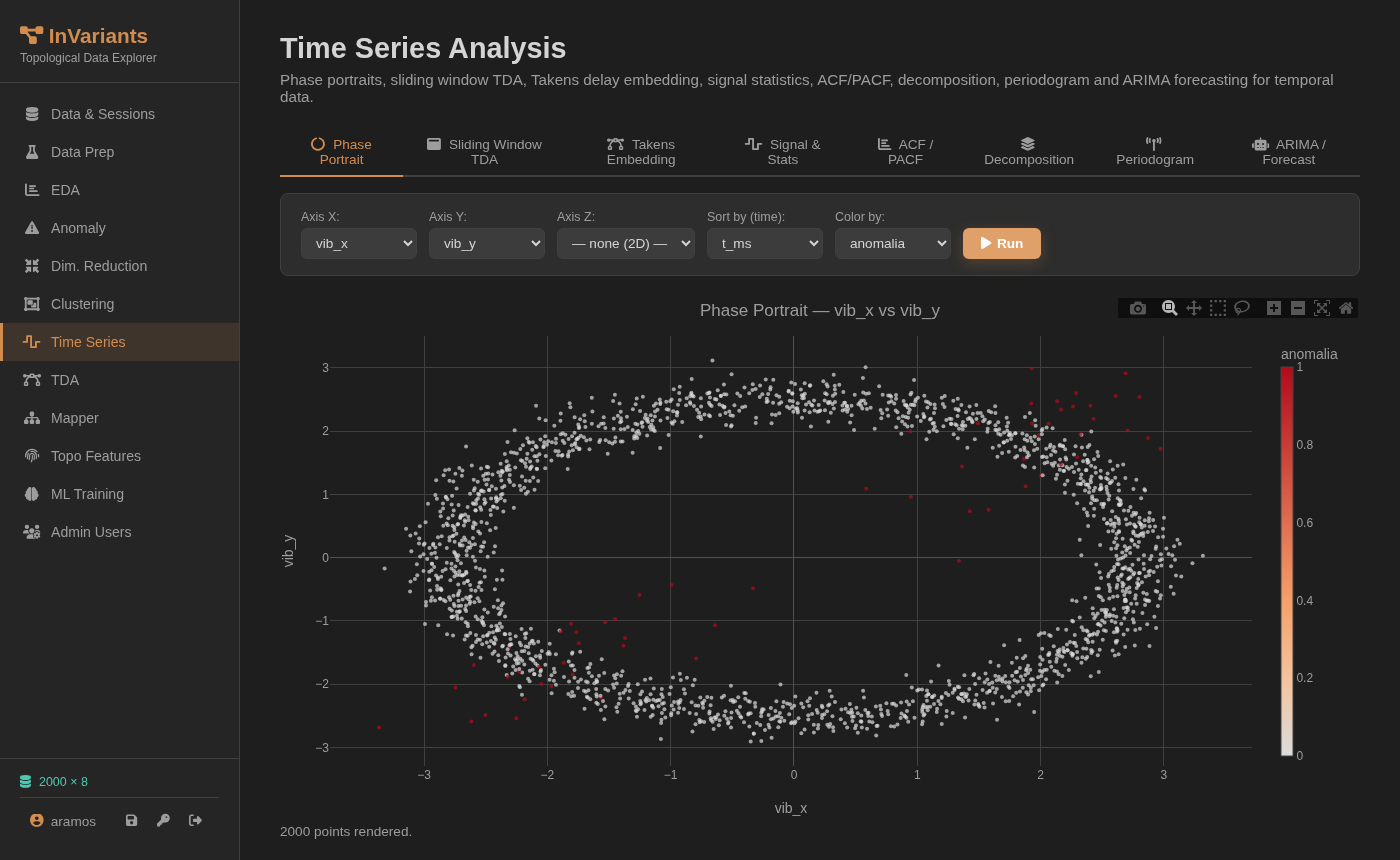
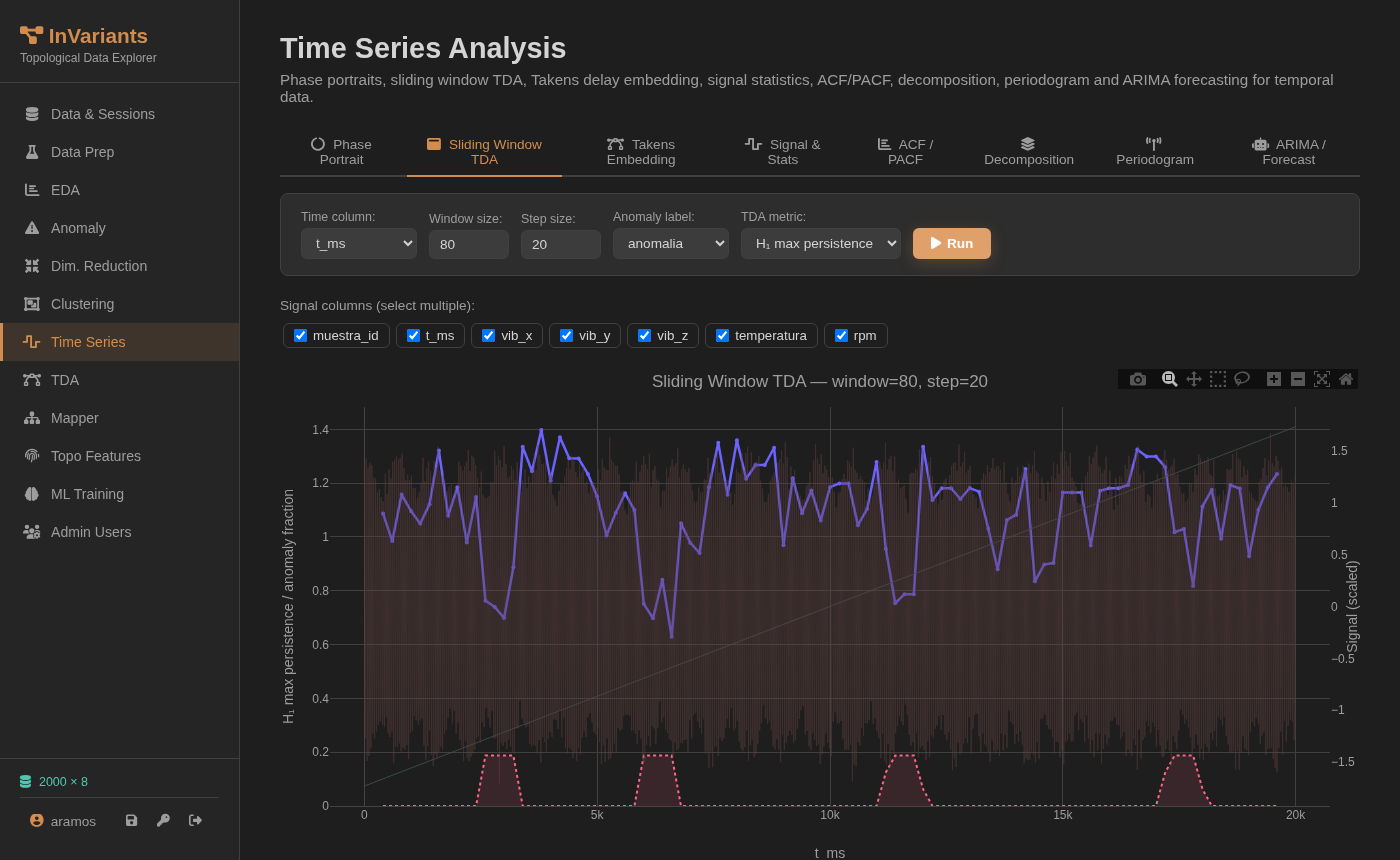
2,000 samples from a bearing spinning at 1,480 rpm, with vibrations on three axes, temperature and RPM recorded every millisecond. 60 samples correspond to real fault states.
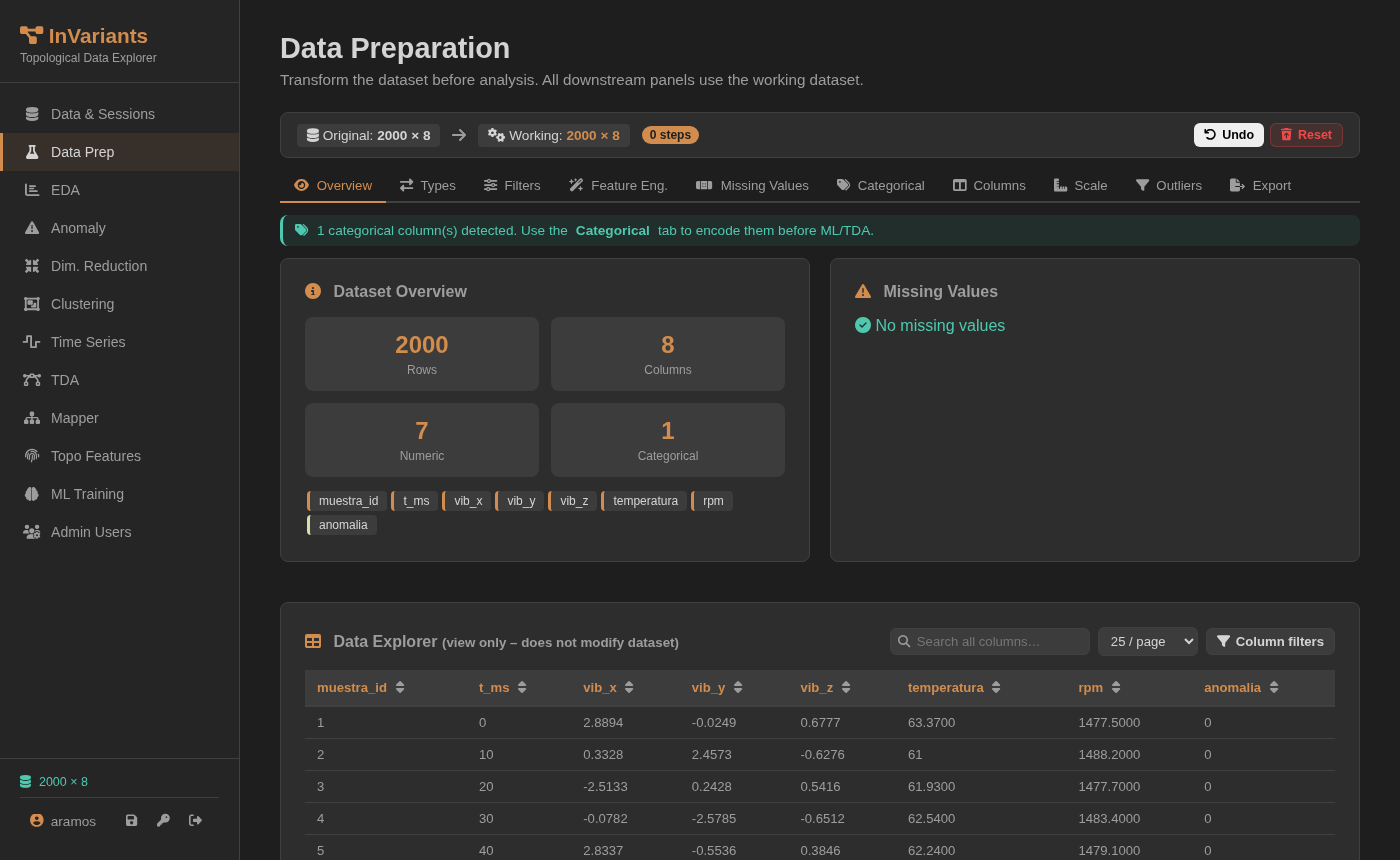
Dataset loaded in InVariants
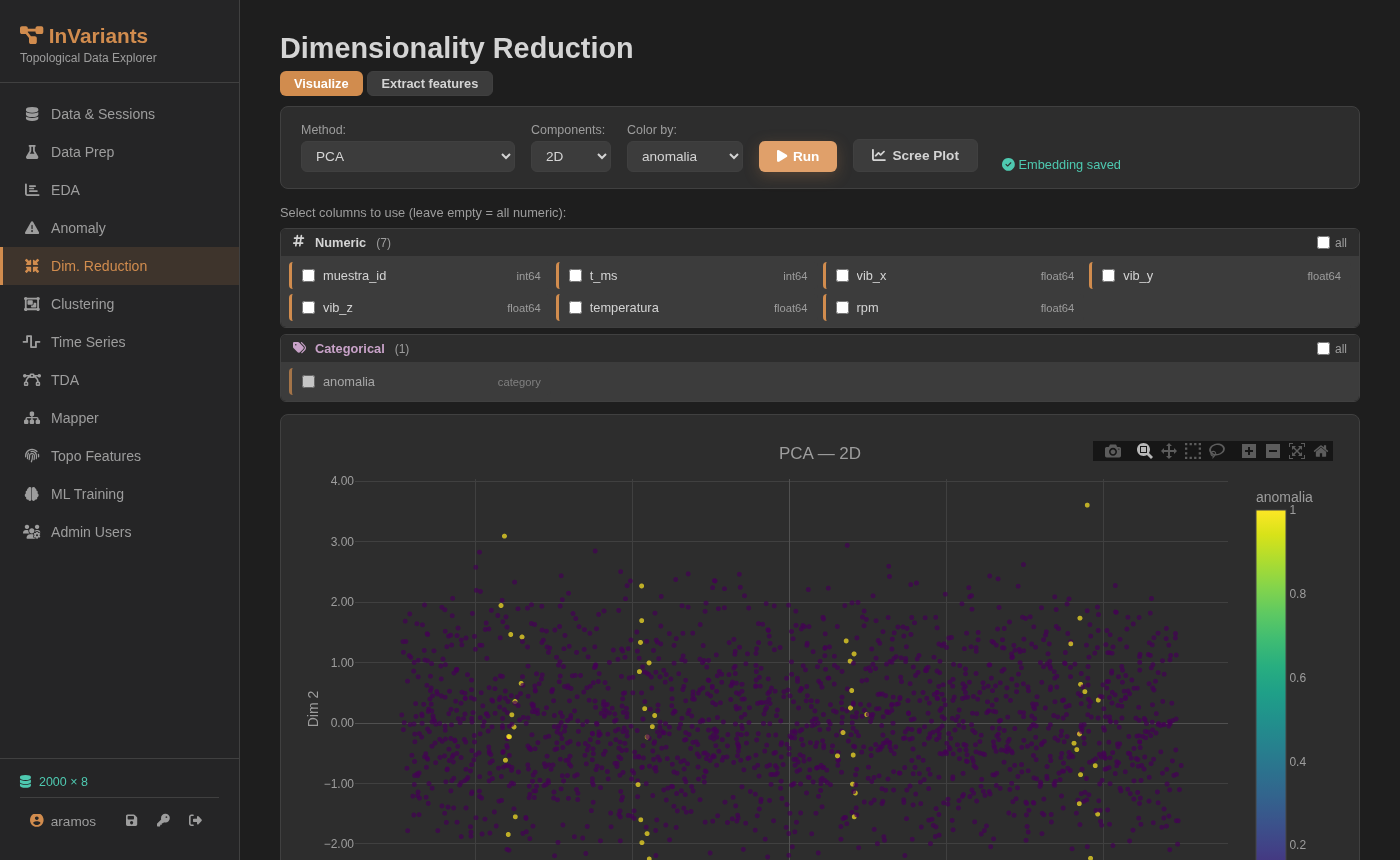
2,000 rows · 8 columns · no missing values. Numeric columns: vib_x, vib_y, vib_z, temperatura, rpm. Target: anomalia.
2,000
Total samples
60
Anomalies (3%)
| Column | Normal μ | Fault μ | Δ |
|---|---|---|---|
| vib_x | 0.009 g | 0.089 g | +0.08 g |
| temperatura | 61.97 °C | 62.07 °C | +0.1 °C |
| rpm | 1480.2 | 1480.2 | 0 |
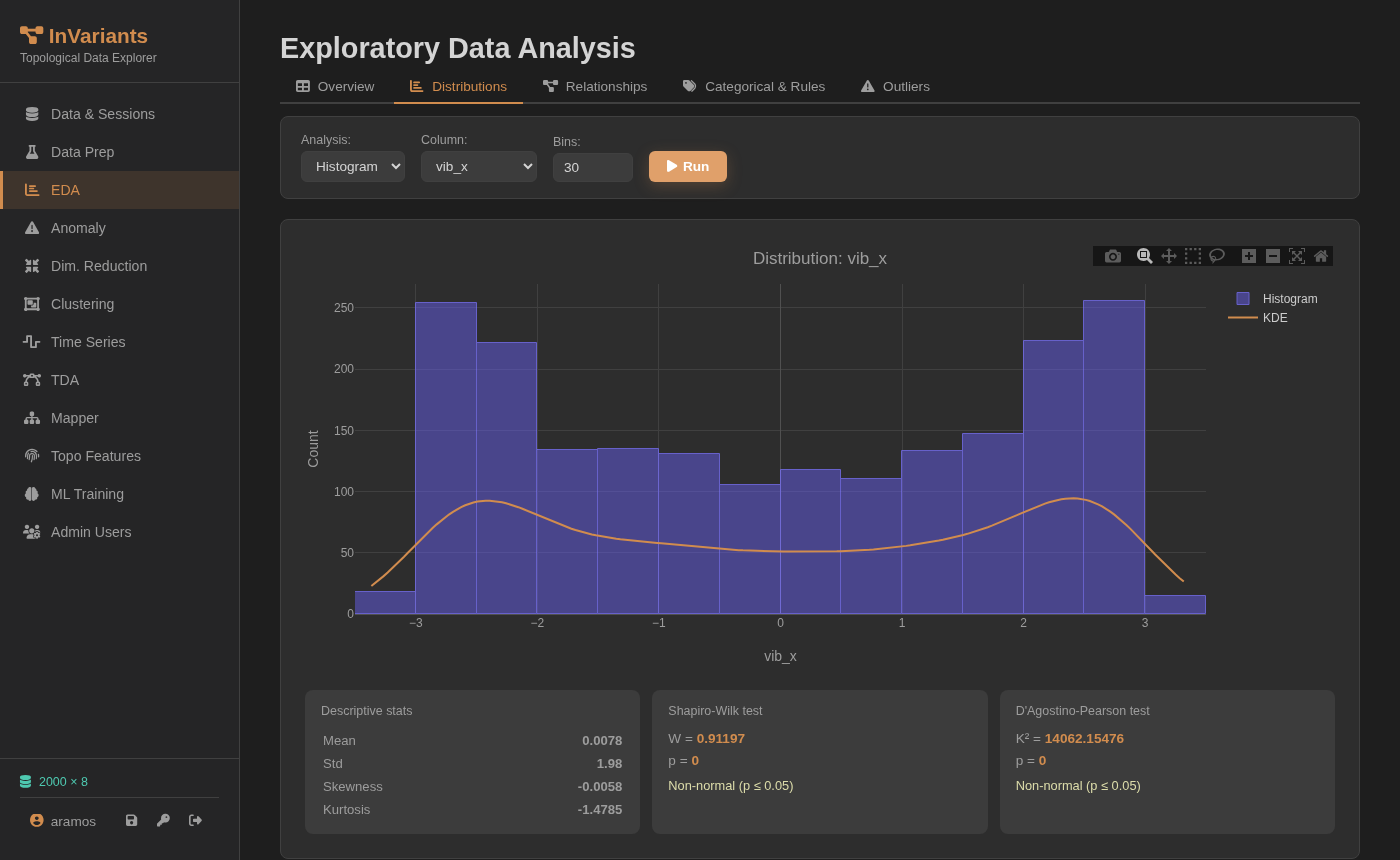
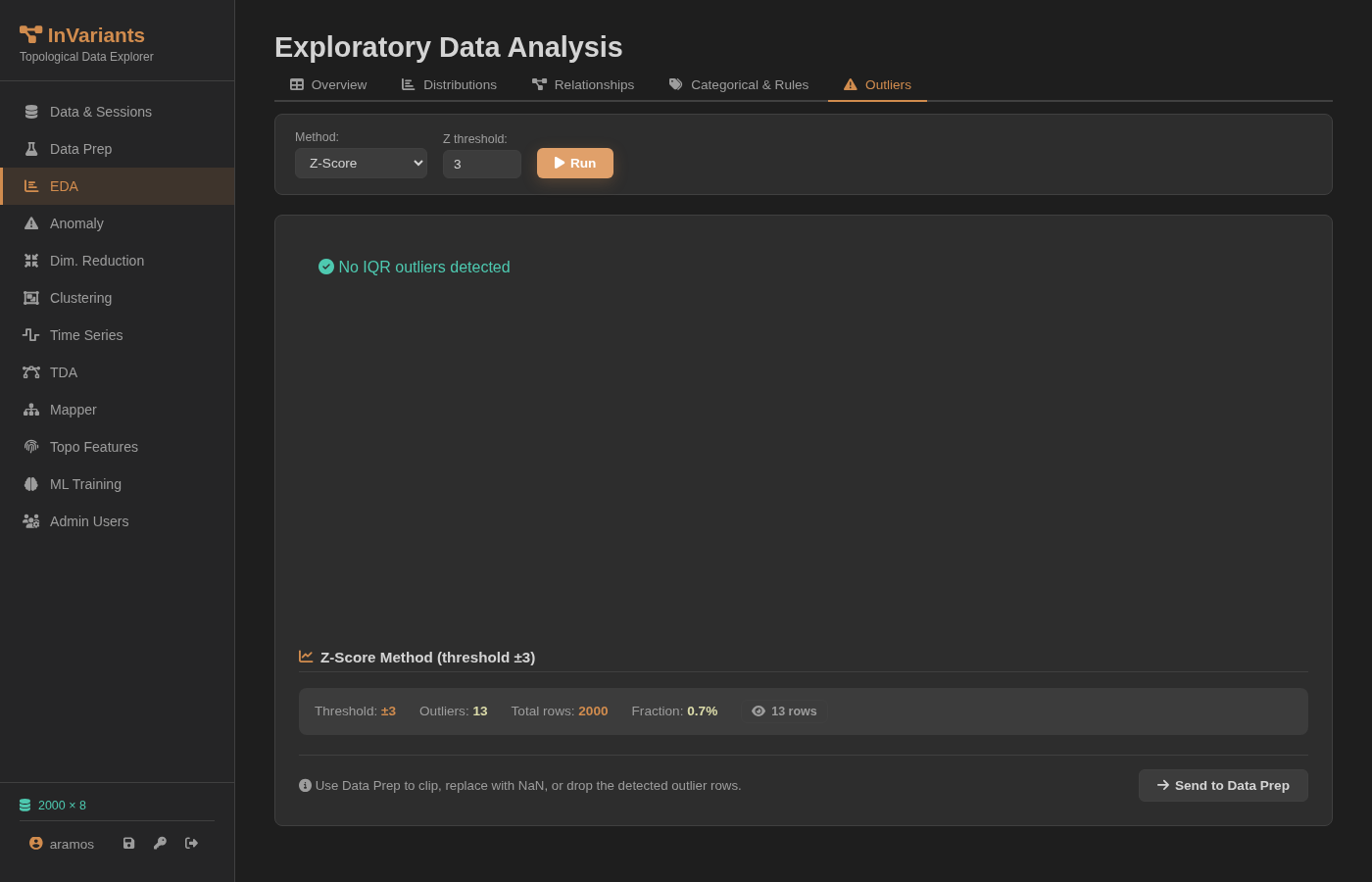
The vibration difference is 0.08 g over a ±3 g range. Temperature: 0.1 degree. RPM: identical. No statistical threshold will catch this.